发电量估算选项卡¶
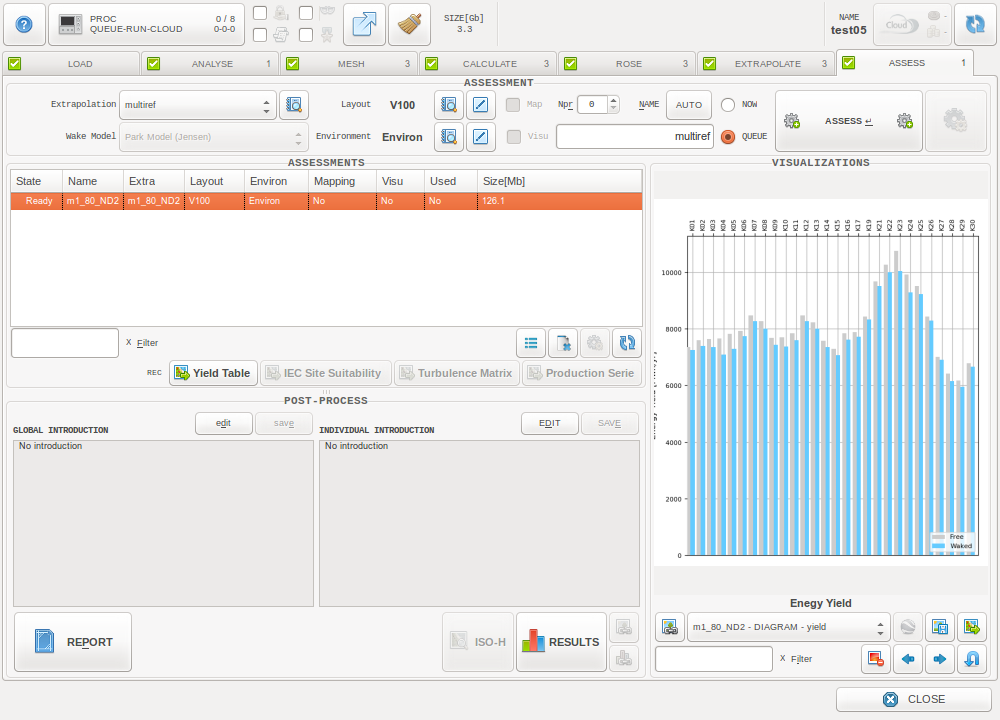
发电量估算选项卡
发电量评估步骤根据风数据外推的结果进行场区内发电量的评估, 风机吸收风中能量, 同时在后方产生尾流, 尾流区域中的风机发电量将收到影响, 减少此区域的风速.
ZephyTOOLS 在风机处提取年发电量(AEP)和其他相关结果, 这些结果基于用户定义的参数, 包括风机型号和环境信息.
进程选项¶

外推文件
从上一步得到的外推结果中选择一个作为计算发电量的输入

尾流模型选取
目前可选择无尾流模型和 Park Jensen 线性尾流模型,帮助用户快速获得尾流后发电量. 未来将会在绘制网格时加入驱动盘功能,直接让尾流参与 CFD 计算获得更准确的结果。

风机机型设置
可以统一设置机型,按分组 (根据风机点位文件中的分组) 或逐个设置机型。

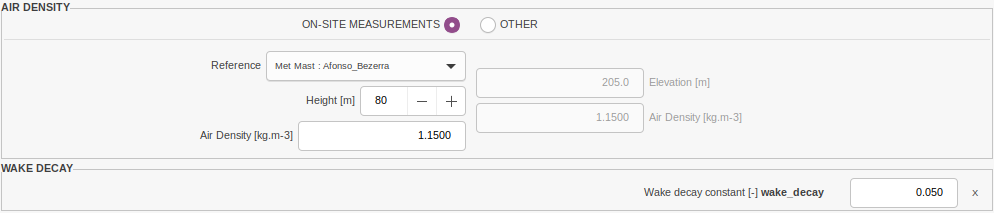
环境参数
The air density is considered constant. It can be set to a general value or a on-site value. The wake decay constant to use can be set here.

绘图,可视化功能
选中Map时,将为绘图区域激活等高可视化。
选中Visu时,将为整个绘图区域激活等高可视化。
注解
这些选项仅在为所选外推激活时才可用。
导出¶
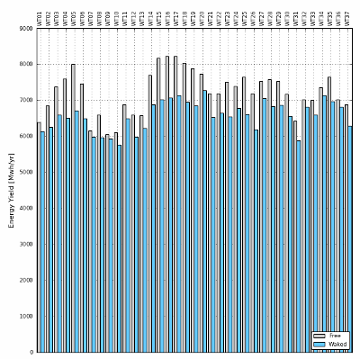
发电量表格¶

输出* .csv结果文件,包括每个风机和整个风场的年度能源产量,风速和不确定性。
有了年发电量信息, 用户可以通过定义下列项目获得长期产量超越等级:
- 折减如`MEASNET中定义的事项: <http://www.measnet.com/wp-content/uploads/2016/05/Measnet_SiteAssessment_V2.0.pdf>`_.
- 历史不确定性和年间变化.
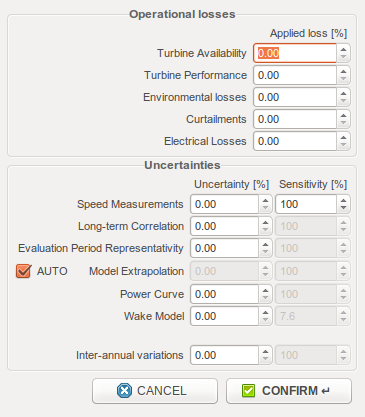
对于历史不确定性, 风速的不确定性将根据产出模型对风速的敏感性来进行权重, 即”敏感度”. 尾流模型不确定性敏感度和尾流损失有关, 由ZephyTOOLS得出.
通过在模型外推不确定性行选择”自动”, 用户可以量化逐等级的不确定性 并获得每台风机的 P50, P75 和P90.
在导出的.CSV文件中, 第一个表格给出了每台风机的:
- 项目名称和风机名称
- 风机类型和装机量(MW)
- X, Y坐标[m]
- 地形高程, 轮毂高度[m]
- 自由流和尾流风速[m/s]
- 尾流损失 [%]
- 利用率 [%]
- 等效小时数 [h]
- 离最近风机距离 [m]
- 最近风机
- 参考高度[m]
- 空气密度[kg/m3]
- 功率密度 [W/m2]
- 平均和最大切变
- 最大切变所在方向[度]
- 平均和最大绝对入流角[度]
- 最大入流角所在方向[度]
- 威布尔A和k [m/s]
第二个表给出逐风机的不确定性和产出:
- 毛, 阵列和净产出 [Mwh/yr]
- 最近参考水平距离 [km]
- 最近参考垂直距离 [m]
- 模型外推不确定性(基本) [%]
- 模型外推不确定性(额外) [%]
- 总不确定性 [%]
- P75 产出 [Mwh/yr]
- P90 产出 [Mwh/yr]
- P95 产出 [Mwh/yr]
接下来输入的折减和不确定性将被汇总. 最终的表格获得整个场址的总结果, 在未来1年, 10年和20年:
- 未来不确定性 [%]
- 总不确定性 [%]
- P50 产出 [Mwh/yr]
- P75 产出 [Mwh/yr]
- P90 产出 [Mwh/yr]
- P95 产出 [Mwh/yr]
警告
当前版本发电量计算模块使用转换为风频矩阵的数据. 因此将无法识别具有延迟性的功率曲线特性: 如, wtg文件中的低风速切入和高风速切入将被和低风速切出, 高风速切出相同的方式分别考虑.
IEC 兼容性¶

将评估的兼容性级别与最新的IEC标准一起导出。
该导出只有在风数据中包含标准偏差列时候可用.
在导出的.CSV文件中, 第一个表格给出了每台风机的:
- 风机名称
- X, Y坐标[m]
- 地形高程, 轮毂高度[m]
- 威布尔A和k [m/s]
- 空气密度 [kg/m3]
- 平均和最大切变
- 最大切变所在方向[度]
- 平均和最大绝对入流角[度]
- 最大入流角所在方向[度]
- Iref-15m/s(IEC-2016-dev)
- Iref-15m/s(IEC-2005)
- Iref-15m/s(IEC-1999)
在不同的IEC标准中, 代表湍流强度有着不同的定义, 但这些定义都使用相同的方法来结合湍流强度平均值和标准偏差:
- 在 IEC 61400-1 2016 版本, 70% 分位数被用于参考, 公式:
 .
. - 在 IEC 61400-1 2005 版本(6.2表1), 15m/s 时的湍流值被用于参考, 公式:
 .
. - 在 IEC 61400-1 1999 版本, 平均湍流强度加标准偏差被用于参考, 公式:
 .
.
同时, .CSV文件中包含了第二个表, 给出了各风机在不同风速缺件内的湍流, 同时也考虑了尾流影响. 这些值 根据该场区 90% 分位数值(IEC 61400-1 Ed.3, 11.9, 公式34),表示为:  .
.
湍流矩阵¶

输出特定涡轮机的湍流矩阵。
该文件以风机参数信息开始, 即:
- 风机名称
- X, Y坐标[m]
- 地形高程, 轮毂高度[m]
- 自由流和尾流风速[m/s]
- 威布尔A和k [m/s]
- 自由流和尾流扇区频率
- 扇区切变
- 平均和最大切变
- 最大切变所在方向[度]
- 出现最大切变扇区的频率 [%]
- 扇区入流角 [度]
- 平均和最大绝对入流角[度]
- 最大入流角所在方向[度]
- 出现最大绝对入流角扇区的频率 [%]
然后表3 给出平均湍流, 湍流标准偏差和考虑尾流的湍流, 均在速度和方向区间内离散化
时间序列¶
Exports a text file containing time series of wind speed, wind direction, and gross energy production for a specific wind turbine.
警告
现版本的发电量时间序列还不考虑尾流模型, 所得即**毛发电量**的时间序列.
技术说明¶
PARK JENSEN 模型¶
- PARK 尾流模型最初由 JENSEN 等人开发并移植到 WASP 软件中的尾流模型.
- 它假设风流经过风机后立即在风机后方造成风速亏损。
- 风速初始亏损由风机本身的推力曲线与当前风速决定。
- 在风机后方风速的恢复与距离呈线性关系。
- 恢复程度取决于尾流衰减系数。
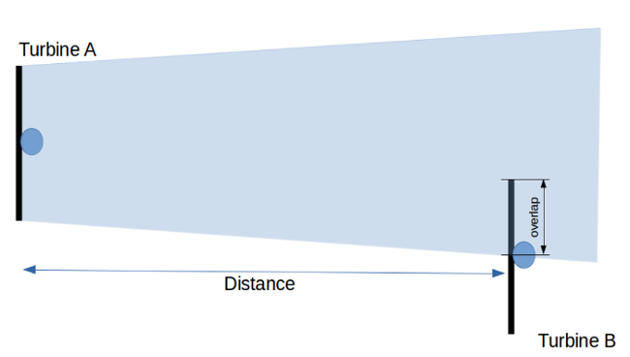
下游风机的风速衰减可以通过以下公式进行计算:

其中:
- U 表示上游风机 A 位置的风速
- Ct 表示上游风机 A 在当前风速下的推力系数
- X01 表示风机 A 到风机 B 之间的垂直距离
- D0 表示风机直径
- k 表示尾流衰减系数
- Aoverlap 和 A1分别表示下游风机在尾流影响域的扫风面积和自身扫风面积
最终风机 B 处的风速等于该处自由流风速减去由上述供述计算得出的尾流亏损。
如果风机B受到多个上游风机的影响,我们只考虑最大亏损。
制动盘 (Actuator Disc) 尾流模型¶
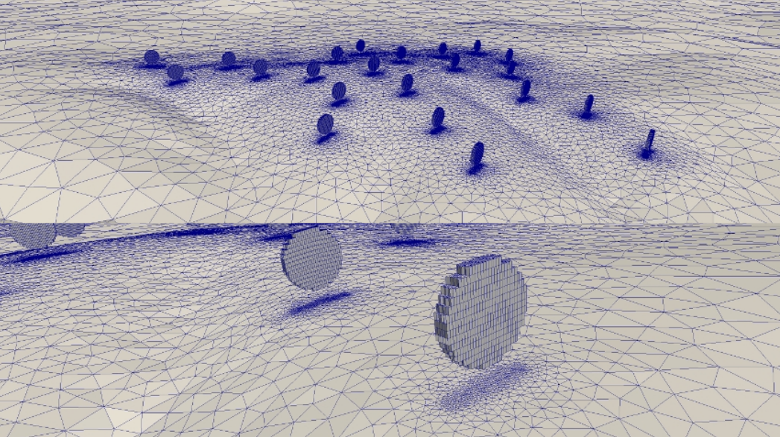
制动盘的作用可以简要解释为:把风机直接加入 CFD 计算,无需考虑线性尾流模型中忽略的地方,如前方第一个风机对第三个风机的影响,多个风机之间的互相影响。
目前的主要难点是计算两巨大,主要是来自两方面的限制:
- 网格加密: 制动盘模型需将风机转子加密至 1m 分辨率方可放入模型, 目前常见的结构化网格加密区域一直延伸到边界, 总网格块数量将难以估计。
- 计算资源: 无论结构网格还是非结构网格,在制动盘模型中都需要使用巨大数量的单元格,需要更多的计算资源,而有限的本地计算资源难以在段时间内进行如此大量计算.
因此,阻碍我们获得更准确 CFD结果的根本障碍是计算资源的分配!
择风大师驱动盘尾流模型包括下列步骤:
- 36个每10度的无尾流计算.
- 风数据提取: 择风从外推结果中提取自由风速,风加速因子以及水平偏转
- 重新绘制网格: 提取每个轮毂位置的风向信息, 在每个转子可能对应的精确朝向生成 36 个驱动盘网格
- 结果映射: 用一个较高的风推力系数自动初始化气流
- CFD 尾流计算
10 个连续的 CFD 计算即可开始在每两个 CFD 计算之间,推力系数都会变化以计算尾流 10 个不同风速区间上的减损
注解
总计算量: 38 个网格 - 432 CFD 计算 - 37 重映射进程
空气密度¶
ZephyCFD如何处理空气密度的变化?
有两种变化:
与空间有关的变化
如何考虑由结果位置发生的密度变化。
将与参考高度href相关联的参考空气密度ρref指定为评估过程的输入。
ρref:参考密度,单位为kg / m3
href参考高度,单位为m
这些输入用于评估每个结果点的密度ρ,考虑其高度h,以米为单位,可得如下公式:
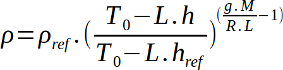
附:
- P0 = 101.325 kPa(海平面标准大气压)
- T0 = 288.15 K(海平面标准温度)
- g = 9.80665 m / s2(地表重力加速度)
- L = 0.0065 K / m(温度下降率)
- R = 8.31447 J /(mol.K)(理想气体常数)
- M = 0.0289644 kg / mol(干燥空气的摩尔质量)
与时间有关的变化
如何考虑由时间发生的密度变化。
与所有其他软件一样,ZephyCFD评估流程未考虑空气密度随时间的变化。
注解
注意,应该尽快解决此问题,因为它可能对能量估算有较大的影响。
逐风机不确定性¶
“逐风机不确定性”最初在18.09版本找那个引入, 用于获得各风机的 P75, P90 和 P95结果.
早起版本算法考虑风流模型的不确定性随着离最近参考距离的增加而增加. 水平和垂直部分被分别考虑, 通过考虑他们的不同系数. 这个系数是经验性的, 且根据场址复杂性的不同, 这个值也不同: 通过 ZIX 值.
最终参考点给出的不确定性可以通过公式表达: 
 和:math:d_v 分别表示水平和垂直距离.:math:alpha_h`和 :math:alpha_v` 分别表示水平和垂直的系数:
和:math:d_v 分别表示水平和垂直距离.:math:alpha_h`和 :math:alpha_v` 分别表示水平和垂直的系数:
| 复杂度 | ZIX |  [%/km] [%/km] |
 [%/m] [%/m] |
|---|---|---|---|
| 简单 | 0 | 0.5 | 0.05 |
| 中等 | 1 | 0.7 | 0.07 |
| 复杂 | 2 | 0.9 | 0.09 |
| 高度复杂 | 3 | 1.0 | 0.1 |